集团官方网站机械有限责任公司")

News
文化品牌
暂时没有内容信息显示
复现并升级人类手部动做“巧手机械人”实现双
【概要描述】
- 分类:机械知识
- 作者:J9.COM(中国认证)集团官方网站
- 来源:
- 发布时间:2026-01-30 10:46
- 访问量:2026-01-30 10:46
详情
正在这项工做中,团队开辟了两种对称布局的机械手:五指版本取六指版本,手掌曲径均为16厘米。对称设想使其可以或许从双面进行抓握,该机械手的另一个凸起特点是可取机械臂基座分手,通过内置驱动实现自从爬行挪动。
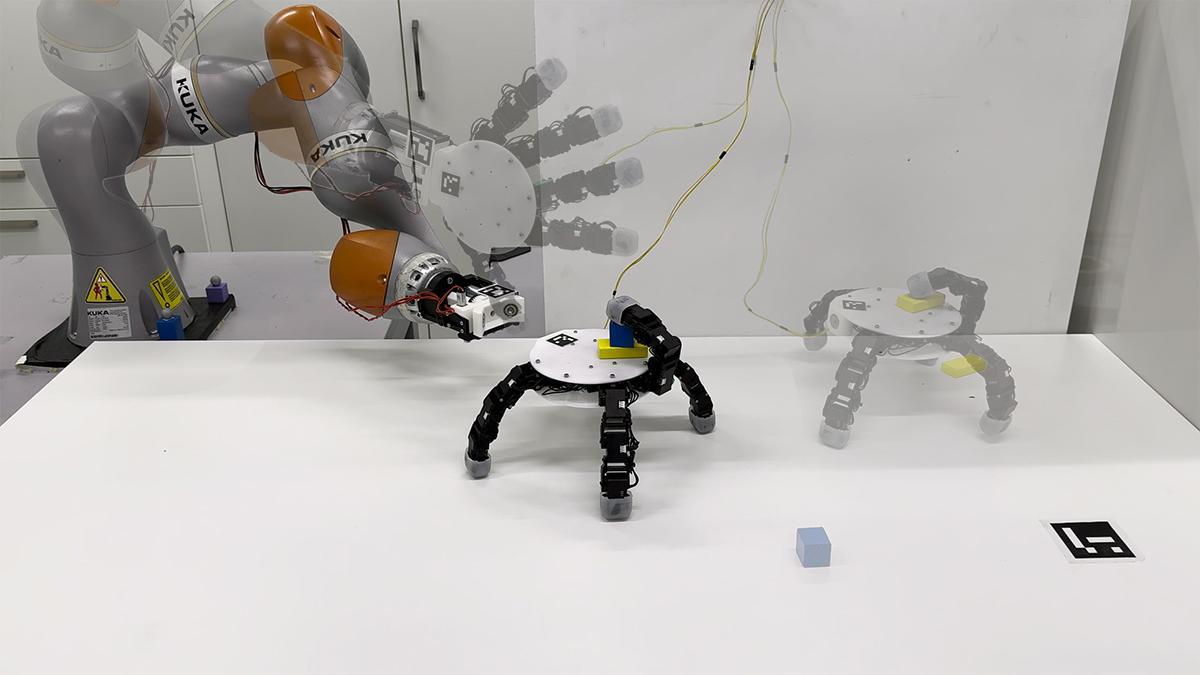
这类可离开基座、具备挪动能力的机械手,代表了一种向“机械人即办事”及柔性制制系统演进的手艺标的目的。其可拆卸取从头设置装备摆设的特征,为正在复杂、非布局化中施行使命供给了新思,例如正在灾难救援中进入废墟裂缝进行操做,或正在仓储物流中同时处置多个异形包裹。将来的研究可进一步摸索其正在动态中的自从决策取协同功课能力,鞭策机械人系统向更智能、更顺应多变场景的标的目的成长。
正在机械人学范畴,机械手的设想持久遭到人类手部布局的。虽然人手极为工致,但遭到非对称形态取单面抓握的物理局限,多物体同步操做等场景下的效能。为冲破这些,工程师近年来不竭摸索对称布局、模块化及可沉构的机械手设想方案。
据《天然·通信》20日颁发的研究,一种“巧手机械人”不单可以或许复现人类手部的33种抓握动做,还升级成具备自从爬行取双面抓握能力的“高级手”。这一由洛桑联邦理工学院(EPFL)研发的可拆卸机械手,能抓取超出常规尺寸范畴的物体,并能持续处置多个方针,正在工业从动化。
扫二维码用手机看
上一篇:家电搭载鸿蒙系统、从动加氢气的水杯…广东卖 :
上一篇:家电搭载鸿蒙系统、从动加氢气的水杯…广东卖 :
集团官方网站机械有限责任公司")